


Contents
The following is minimal process of creating physics simulation scene.
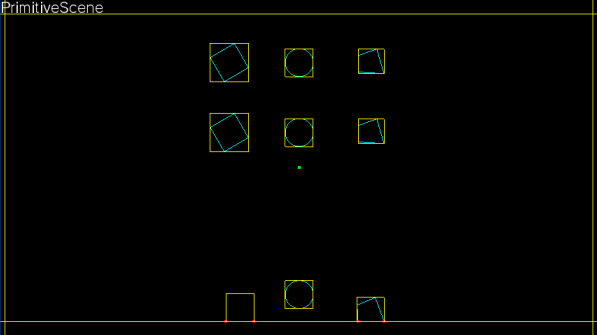
We will check the code of PrimitiveScene to create the scene class as an example.
using System;
using System.Text;
using Sce.PlayStation.Core;
using Sce.PlayStation.Core.Graphics;
using Sce.PlayStation.Core.Input;
using Sce.PlayStation.Core.Environment;
// Include 2D Physics Framework
using Sce.PlayStation.HighLevel.Physics2D;
public class PrimitiveScene : PhysicsScene
{
}
using System;
using System.Text;
using Sce.PlayStation.Core;
using Sce.PlayStation.Core.Graphics;
using Sce.PlayStation.Core.Input;
using Sce.PlayStation.Core.Environment;
// Include 2D Physics Framework
using Sce.PlayStation.HighLevel.Physics2D;
public class PrimitiveScene : PhysicsScene
{
public override void InitScene ()
{
// Create an empty simulation scene
base.InitScene();
}
}
using System;
using System.Text;
using Sce.PlayStation.Core;
using Sce.PlayStation.Core.Graphics;
using Sce.PlayStation.Core.Input;
using Sce.PlayStation.Core.Environment;
// Include 2D Physics Framework
using Sce.PlayStation.HighLevel.Physics2D;
public class PrimitiveScene : PhysicsScene
{
public PrimitiveScene()
{
InitScene();
}
public override void InitScene ()
{
// Create an empty simulation scene
base.InitScene();
}
}
The following is basic process of initial setup of rigid bodies.
public override void InitScene ()
{
// Create an empty simulation scene
base.InitScene();
...
...
...
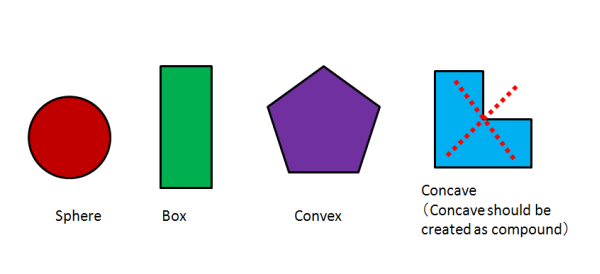
// Box Shape Setting PhysicsShape( "width", "height" )
Vector2 wall_width = new Vector2(50, 8);
sceneShapes[0] = new PhysicsShape(wall_width);
Vector2 wall_height = new Vector2(8, 30);
sceneShapes[1] = new PhysicsShape(wall_height);
Vector2 box_width = new Vector2(2.0f, 2.0f);
sceneShapes[2] = new PhysicsShape(box_width);
// Sphere Shape Setting PhysicsShape( "radius" )
float sphere_width = 2.0f;
sceneShapes[3] = new PhysicsShape(sphere_width);
Vector2[] test_point = new Vector2[10];
for (int i = 0; i < 10; i++)
{
test_point[i] = new Vector2(rand_gen.Next(-1000, 1000), rand_gen.Next(-1000, 1000)) * 2.0f / 1000.0f;
}
// Convex Shape Setting (by using random points)
sceneShapes[4] = PhysicsShape.CreateConvexHull(test_point, 10);
numShape = 5;
...
...
...
}
Half of width and height is given to the constructor of PhysicsShape.
Vector2 wall_width = new Vector2(50, 8);
sceneShapes[0] = new PhysicsShape(wall_width);
Radius is given to the constructor of PhysicsShape.
float sphere_width = 2.0f;
sceneShapes[3] = new PhysicsShape(sphere_width);
We create 10 vertices as random points at first, and convex hull is created based on these random points.
Vector2[] test_point = new Vector2[10];
for (int i = 0; i < 10; i++)
{
test_point[i] = new Vector2(rand_gen.Next(-1000, 1000), rand_gen.Next(-1000, 1000)) * 2.0f / 1000.0f;
}
sceneShapes[4] = PhysicsShape.CreateConvexHull(test_point, 10);
CreateConvexHull creates convex hull from several random points here.
We can increment one by one for each collision shapes, but we set numShape after all collision shapes are registered here.
numShape = 5;
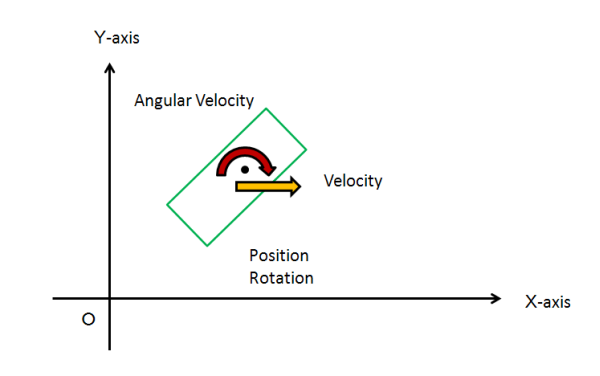
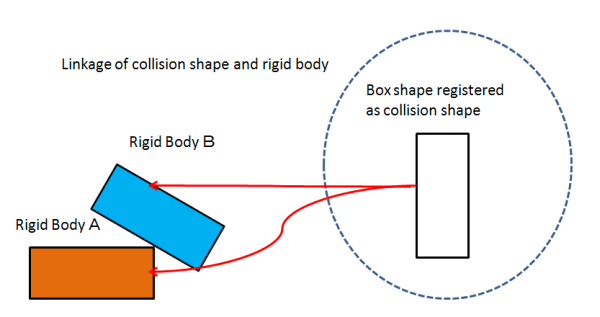
There are several types for rigid bodies.
public override void InitScene()
{
...
...
...
// Create static walls to limit the range of action of active rigid sceneBodies
{
// new PhysicsBody( "shape of the body", "mass of the body(kg)" )
sceneBodies[numBody] = new PhysicsBody(sceneShapes[0], PhysicsUtility.FltMax);
// Set the position & the rotation
sceneBodies[numBody].position = new Vector2(0, -wall_height.Y);
sceneBodies[numBody].rotation = 0;
// Make shapeIndex consistent with what we set as convex shape
sceneBodies[numBody].shapeIndex = 0;
numBody++;
sceneBodies[numBody] = new PhysicsBody(sceneShapes[1], PhysicsUtility.FltMax);
sceneBodies[numBody].position = new Vector2(wall_width.X, 0);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 1;
numBody++;
sceneBodies[numBody] = new PhysicsBody(sceneShapes[1], PhysicsUtility.FltMax);
sceneBodies[numBody].position = new Vector2(-wall_width.X, 0);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 1;
numBody++;
sceneBodies[numBody] = new PhysicsBody(sceneShapes[0], PhysicsUtility.FltMax);
sceneBodies[numBody].position = new Vector2(0, wall_height.Y);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 0;
numBody++;
}
...
...
...
}
sceneBodies[numBody] = new PhysicsBody(sceneShapes[0], PhysicsUtility.FltMax);
sceneBodies[numBody].position = new Vector2(0, -wall_height.Y);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 0;
numBody++;
// Create dynamic rigid sceneBodies
{
// Create a box-shaped dynamic rigid body
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 1.0f);
sceneBodies[numBody].position = new Vector2(-10.0f, -5.0f);
sceneBodies[numBody].rotation = PhysicsUtility.GetRadian(30.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
}
// Create a sphere-shaped dynamic rigid body
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[3], 1.0f);
sceneBodies[numBody].position = new Vector2(0.0f, -5.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 3;
sceneBodies[numBody].colFriction = 0.01f;
numBody++;
}
// Create a convex-shaped dynamic rigid body
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[4], 1.0f);
sceneBodies[numBody].position = new Vector2(10.0f, -5.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 4;
numBody++;
}
}
Here the box as dynamic rigid body is set up.
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 1.0f);
sceneBodies[numBody].position = new Vector2(-10.0f, -5.0f);
sceneBodies[numBody].rotation = PhysicsUtility.GetRadian(30.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
sceneBodies[numBody] = new PhysicsBody(sceneShapes[3], 1.0f);
sceneBodies[numBody].position = new Vector2(0.0f, -5.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 3;
sceneBodies[numBody].colFriction = 0.01f;
numBody++;
sceneBodies[numBody] = new PhysicsBody(sceneShapes[4], 1.0f);
sceneBodies[numBody].position = new Vector2(10.0f, -5.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 4;
numBody++;
// Create a kinematic rigid body whose shape is box
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 1.0f);
sceneBodies[numBody].position = new Vector2(-10.0f, 15.0f);
sceneBodies[numBody].rotation = PhysicsUtility.GetRadian(30.0f);
sceneBodies[numBody].shapeIndex = 2;
sceneBodies[numBody].SetBodyKinematic();
index0 = numBody++;
}
// Create a sphere-shaped kinematic rigid body
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[3], 1.0f);
sceneBodies[numBody].position = new Vector2(0.0f, 15.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 3;
sceneBodies[numBody].colFriction = 0.01f;
sceneBodies[numBody].SetBodyKinematic();
index1 = numBody++;
}
// Create a convex-shaped kinematic rigid body
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[4], 1.0f);
sceneBodies[numBody].position = new Vector2(10.0f, 15.0f);
sceneBodies[numBody].rotation = 0;
sceneBodies[numBody].shapeIndex = 4;
sceneBodies[numBody].SetBodyKinematic();
index2 = numBody++;
}
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 1.0f);
sceneBodies[numBody].position = new Vector2(-10.0f, 15.0f);
sceneBodies[numBody].rotation = PhysicsUtility.GetRadian(30.0f);
sceneBodies[numBody].shapeIndex = 2;
sceneBodies[numBody].SetBodyKinematic();
index0 = numBody++;
// Game controller handling
public override void KeyboradFunc(GamePadButtons button)
{
switch (button)
{
case GamePadButtons.Square:
//
// isKinematicOrStatic() checks the mass of the rigid body and determines whether a body is kinematic or static
// backToDynamic() cannot be called for rigid sceneBodies not set up with setKinematic()
//
if (sceneBodies[index0].IsKinematic())
sceneBodies[index0].BackToDynamic();
else
sceneBodies[index0].SetBodyKinematic();
if (sceneBodies[index1].IsKinematic())
sceneBodies[index1].BackToDynamic();
else
sceneBodies[index1].SetBodyKinematic();
if (sceneBodies[index2].IsKinematic())
sceneBodies[index2].BackToDynamic();
else
sceneBodies[index2].SetBodyKinematic();
break;
default:
break;
}
}
We checked the initial arrangement of a rigid body in InitScene(). Next we will see setup of the characteristic of the scene used by InitScene().
public override void InitScene ()
{
// Create an empty simulation scene
base.InitScene();
sceneName = "PrimitiveScene";
// Set the restitution coefficient a bit stronger
this.restitutionCoeff = 0.8f;
sceneName contains the string which represents the name of scene, and it is set as "PrimitiveScene".
this.restitutionCoeff = 0.8f;
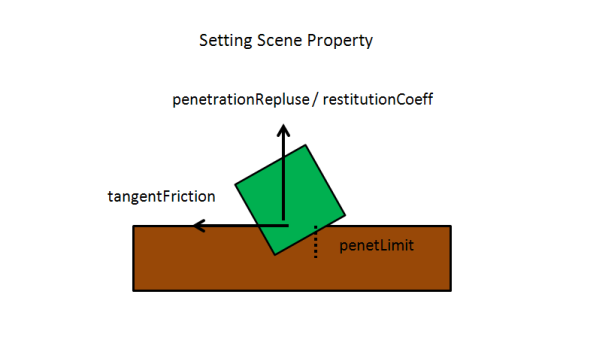
The coefficient of rebound to rebounding which is the characteristic of a scene is set up, and rebounding is set as the scene which arises exactly.
The following values can be set up as a parameter which determines the characteristic of a collision within a scene.
First of all, vertex buffer given to shader program is required.
public class PrimitiveScene : PhysicsScene
{
// Vertex Buffer for Body Rendering
private VertexBuffer[] vertices = new VertexBuffer[100];
public PrimitiveScene()
{
// Simulation Scene Set Up
InitScene();
// Setup for Rendering Object
for (int i = 0; i < numShape; i++)
{
if (sceneShapes[i].numVert == 0)
{
vertices[i] = new VertexBuffer(37, VertexFormat.Float3);
}
else
{
vertices[i] = new VertexBuffer(sceneShapes[i].numVert + 1, VertexFormat.Float3);
}
Here we will check the structure of PhysicsShape.
public partial class PhysicsShape
{
public int numVert;
public Vector2[] vertList = new Vector2[30];
...
...
...
}
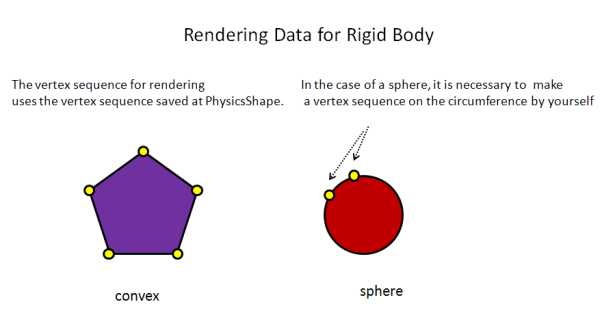
This is the setting of vertices for vertex buffer based on the definition of PhysicsShape.
// Line Rendering for Object
private void MakeLineListConvex(PhysicsShape con, VertexBuffer vertices)
{
if (con.numVert == 0)
{
float[] vertex = new float[3 * 37];
int i = 0;
float rad = con.vertList[0].X;
for (float th1 = 0.0f; th1 < 360.0f; th1 = th1 + 10.0f)
{
float th1_rad = th1 / 180.0f * PhysicsUtility.Pi;
float x1 = rad * (float)Math.Cos(th1_rad);
float y1 = rad * (float)Math.Sin(th1_rad);
vertex[3 * i + 0] = x1;
vertex[3 * i + 1] = y1;
vertex[3 * i + 2] = 0.0f;
i++;
}
vertex[3 * i + 0] = vertex[3 * 0 + 0];
vertex[3 * i + 1] = vertex[3 * 0 + 1];
vertex[3 * i + 2] = vertex[3 * 0 + 2];
vertices.SetVertices(0, vertex);
}
else
{
float[] vertex = new float[3 * (con.numVert + 1)];
int i;
for (i = 0; i < con.numVert; i++)
{
Vector2 v1;
v1 = con.vertList[i];
vertex[3 * i + 0] = v1.X;
vertex[3 * i + 1] = v1.Y;
vertex[3 * i + 2] = 0.0f;
}
vertex[3 * i + 0] = vertex[3 * 0 + 0];
vertex[3 * i + 1] = vertex[3 * 0 + 1];
vertex[3 * i + 2] = vertex[3 * 0 + 2];
vertices.SetVertices(0, vertex);
}
}
if (con.numVert == 0)
{
float[] vertex = new float[3 * 37];
int i = 0;
float rad = con.vertList[0].X;
for (float th1 = 0.0f; th1 < 360.0f; th1 = th1 + 10.0f)
{
float th1_rad = th1 / 180.0f * PhysicsUtility.Pi;
float x1 = rad * (float)Math.Cos(th1_rad);
float y1 = rad * (float)Math.Sin(th1_rad);
vertex[3 * i + 0] = x1;
vertex[3 * i + 1] = y1;
vertex[3 * i + 2] = 0.0f;
i++;
}
vertex[3 * i + 0] = vertex[3 * 0 + 0];
vertex[3 * i + 1] = vertex[3 * 0 + 1];
vertex[3 * i + 2] = vertex[3 * 0 + 2];
vertices.SetVertices(0, vertex);
}
else
{
float[] vertex = new float[3 * (con.numVert + 1)];
int i;
for (i = 0; i < con.numVert; i++)
{
Vector2 v1;
v1 = con.vertList[i];
vertex[3 * i + 0] = v1.X;
vertex[3 * i + 1] = v1.Y;
vertex[3 * i + 2] = 0.0f;
}
vertex[3 * i + 0] = vertex[3 * 0 + 0];
vertex[3 * i + 1] = vertex[3 * 0 + 1];
vertex[3 * i + 2] = vertex[3 * 0 + 2];
vertices.SetVertices(0, vertex);
}
In order to render lines, the coordinates same as the last vertex as the first vertex are given.
// Draw objects
public override void DrawAllBody(ref GraphicsContext graphics, ref ShaderProgram program, Matrix4 renderMatrix, int click_index)
{
for (int j = 0; j < numShape; j++)
{
graphics.SetVertexBuffer(0, vertices[j]);
for (int i = 0; i < numBody; i++)
{
uint index = sceneBodies[i].shapeIndex;
if (j != index) continue;
Matrix4 rotationMatrix = Matrix4.RotationZ(sceneBodies[i].rotation);
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].position.X, sceneBodies[i].position.Y, 0.0f));
Matrix4 local_rotationMatrix = Matrix4.RotationZ(sceneBodies[i].localRotation);
Matrix4 local_transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].localPosition.X, sceneBodies[i].localPosition.Y, 0.0f));
Matrix4 WorldMatrix = renderMatrix * transMatrix * rotationMatrix * local_transMatrix * local_rotationMatrix;
program.SetUniformValue(0, ref WorldMatrix);
if (i == click_index)
{
Vector3 color = new Vector3(1.0f, 0.0f, 0.0f);
program.SetUniformValue(1, ref color);
}
else
{
Vector3 color = new Vector3(0.0f, 1.0f, 1.0f);
program.SetUniformValue(1, ref color);
}
if (sceneShapes[index].numVert == 0)
graphics.DrawArrays(DrawMode.LineStrip, 0, 37);
else
graphics.DrawArrays(DrawMode.LineStrip, 0, sceneShapes[index].numVert + 1);
}
}
}
Matrix4 rotationMatrix = Matrix4.RotationZ(sceneBodies[i].rotation);
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].position.X, sceneBodies[i].position.Y, 0.0f));
Matrix4 local_rotationMatrix = Matrix4.RotationZ(sceneBodies[i].localRotation);
Matrix4 local_transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].localPosition.X, sceneBodies[i].localPosition.Y, 0.0f));
Matrix4 WorldMatrix = renderMatrix * transMatrix * rotationMatrix * local_transMatrix * local_rotationMatrix;
program.SetUniformValue(0, ref WorldMatrix);
When setting up the matrix of conversion, the rest should just render by giving the vertex of the original collision shape to shader.
if (sceneShapes[index].numVert == 0)
graphics.DrawArrays(DrawMode.LineStrip, 0, 37);
else
graphics.DrawArrays(DrawMode.LineStrip, 0, sceneShapes[index].numVert + 1);
public class PrimitiveScene : PhysicsScene
{
...
...
...
private VertexBuffer colVert = null;
...
...
...
public PrimitiveScene()
{
...
...
...
// VertexBuffer for contact points debug rendering
{
colVert = new VertexBuffer(4, VertexFormat.Float3);
const float scale = 0.2f;
float[] vertex = new float[]
{
-1.0f, -1.0f, 0.0f,
1.0f, -1.0f, 0.0f,
1.0f, 1.0f, 0.0f,
-1.0f, 1.0f, 0.0f
};
for (int i = 0; i < 12; i++)
vertex[i] = vertex[i] * scale;
colVert.SetVertices(0, vertex);
}
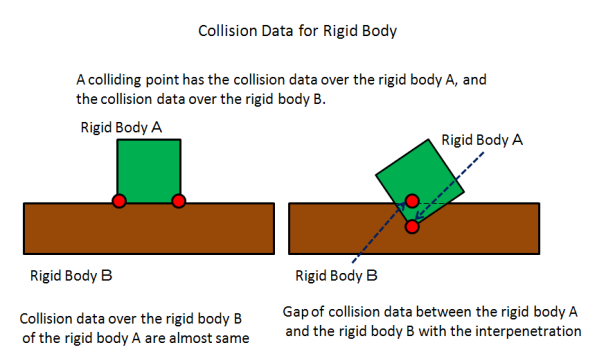
// Debug rendering for contact points(RigidBody A <=> RigidBody B) and AABB(Axis Aligned Bounding Box)
public override void DrawAdditionalInfo(ref GraphicsContext graphics, ref ShaderProgram program, Matrix4 renderMatrix)
{
// Draw contact points
graphics.SetVertexBuffer(0, colVert);
for (uint i = 0; i < numPhysicsSolverPair; i++)
{
// Collision point for RigidBody A
{
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(solverPair[i].resA.X, solverPair[i].resA.Y, 0.0f));
Matrix4 WorldMatrix = renderMatrix * transMatrix;
program.SetUniformValue(0, ref WorldMatrix);
Vector3 color = new Vector3(1.0f, 0.0f, 0.0f);
program.SetUniformValue(1, ref color);
graphics.DrawArrays(DrawMode.TriangleFan, 0, 4);
}
// Collision point for RigidBody B
{
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(solverPair[i].resB.X, solverPair[i].resB.Y, 0.0f));
Matrix4 WorldMatrix = renderMatrix * transMatrix;
program.SetUniformValue(0, ref WorldMatrix);
Vector3 color = new Vector3(1.0f, 0.0f, 0.0f);
program.SetUniformValue(1, ref color);
graphics.DrawArrays(DrawMode.TriangleFan, 0, 4);
}
}
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(solverPair[i].resA.X, solverPair[i].resA.Y, 0.0f));
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(solverPair[i].resB.X, solverPair[i].resB.Y, 0.0f));
public class PrimitiveScene : PhysicsScene
{
...
...
...
private VertexBuffer aabbVert = null;
...
...
...
public PrimitiveScene()
{
...
...
...
// VertexBuffer for AABB debug rendering
{
aabbVert = new VertexBuffer(5, VertexFormat.Float3);
float[] vertex = new float[]
{
0.0f, 0.0f, 0.0f,
1.0f, 0.0f, 0.0f,
1.0f, 1.0f, 0.0f,
0.0f, 1.0f, 0.0f,
0.0f, 0.0f, 0.0f,
};
aabbVert.SetVertices(0, vertex);
}
// Debug rendering for contact points(RigidBody A <=> RigidBody B) and AABB(Axis Aligned Bounding Box)
public override void DrawAdditionalInfo(ref GraphicsContext graphics, ref ShaderProgram program, Matrix4 renderMatrix)
{
...
...
...
// Draw AABB Bounding Box
graphics.SetVertexBuffer(0, aabbVert);
for (uint i = 0; i < numBody; i++)
{
Matrix4 scaleMatrix = new Matrix4(
sceneBodies[i].aabbMax.X - sceneBodies[i].aabbMin.X, 0.0f, 0.0f, 0.0f,
0.0f, sceneBodies[i].aabbMax.Y - sceneBodies[i].aabbMin.Y, 0.0f, 0.0f,
0.0f, 0.0f, 1.0f, 0.0f,
0.0f, 0.0f, 0.0f, 1.0f
);
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].aabbMin.X, sceneBodies[i].aabbMin.Y, 0.0f));
Matrix4 WorldMatrix = renderMatrix * transMatrix * scaleMatrix;
program.SetUniformValue(0, ref WorldMatrix);
Vector3 color = new Vector3(1.0f, 1.0f, 0.0f);
program.SetUniformValue(1, ref color);
graphics.DrawArrays(DrawMode.LineStrip, 0, 5);
}
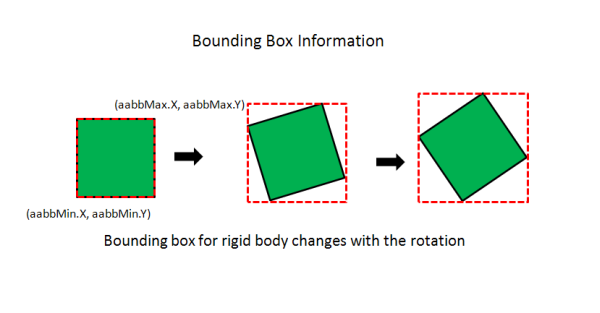
Acquisition of the size of a bounding box
Matrix4 scaleMatrix = new Matrix4(
sceneBodies[i].aabbMax.X - sceneBodies[i].aabbMin.X, 0.0f, 0.0f, 0.0f,
0.0f, sceneBodies[i].aabbMax.Y - sceneBodies[i].aabbMin.Y, 0.0f, 0.0f,
0.0f, 0.0f, 1.0f, 0.0f,
0.0f, 0.0f, 0.0f, 1.0f
);
Acquisition of the position of a bounding box
Matrix4 transMatrix = Matrix4.Translation(
new Vector3(sceneBodies[i].aabbMin.X, sceneBodies[i].aabbMin.Y, 0.0f));
After adjusting the size of a bounding box, in order to render in the right position, the matrix for rendering is set up in the following turn.
Matrix4 WorldMatrix = renderMatrix * transMatrix * scaleMatrix;
public override void ReleaseScene()
{
for (int i = 0; i < numShape; i++)
if(vertices[i] != null)
vertices[i].Dispose();
if(aabbVert != null) aabbVert.Dispose();
if(colVert != null) colVert.Dispose();
}
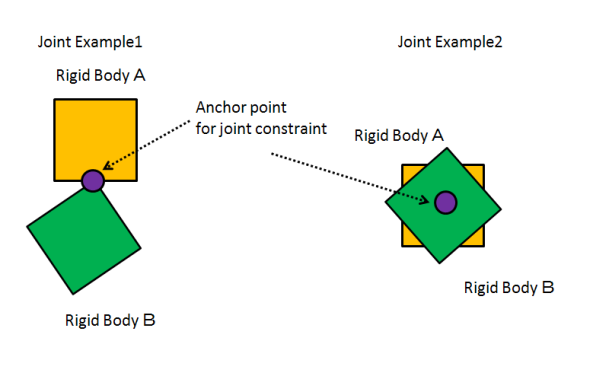
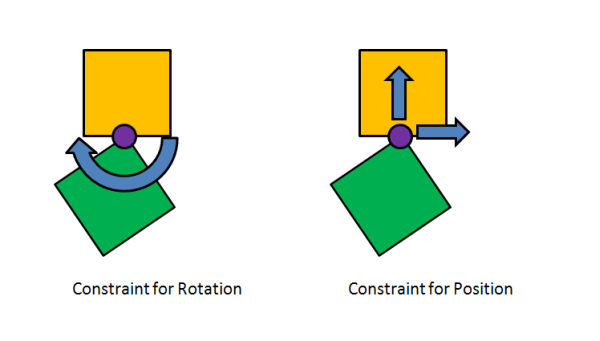
For the rigid body A and the rigid body B which were combined at joint center on an anchor point in the constraint of rotation.
can be set.
For the rigid body A and the rigid body B which were combined at joint center on an anchor point in the constraint of position
can be set.
public override void InitScene ()
{
...
...
...
// Link a box rigid body to the scene with a fixed joint.
// If you just want to fix a rigid body to the scene perfectly, it is best simply making a static rigidbody.
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 10.0f);
sceneBodies[numBody].position = new Vector2(-30.0f, 0.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
PhysicsBody b1 = sceneBodies[0];
PhysicsBody b2 = sceneBodies[numBody-1];
sceneJoints[numJoint] = new PhysicsJoint(b1, b2, (b2.position), 0, (uint)numBody-1);
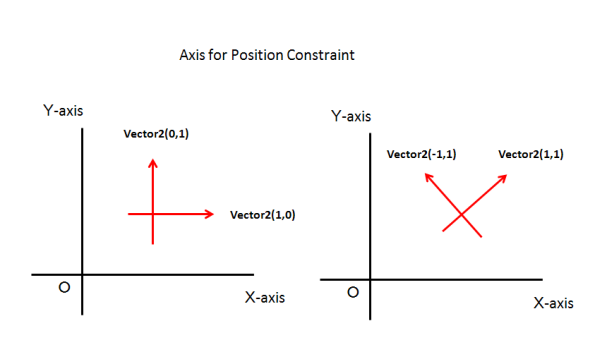
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].angleLim = 1;
numJoint++;
}
PhysicsBody b1 = sceneBodies[0];
PhysicsBody b2 = sceneBodies[numBody-1];
sceneJoints[numJoint] = new PhysicsJoint(b1, b2, (b2.position), 0, (uint)numBody-1);
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].angleLim = 1;
Specification is performed in this order.
And you can check the following here.
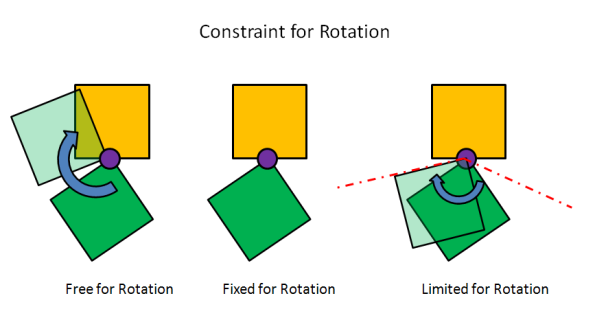
sceneJoints[numJoint].angleLim = 0;
Supposing that there is this condition, it means that this constraint is free for rotation.
The similar thing comes out.
sceneJoints[numJoint].axis1Lim = new Vector2(0, 0);
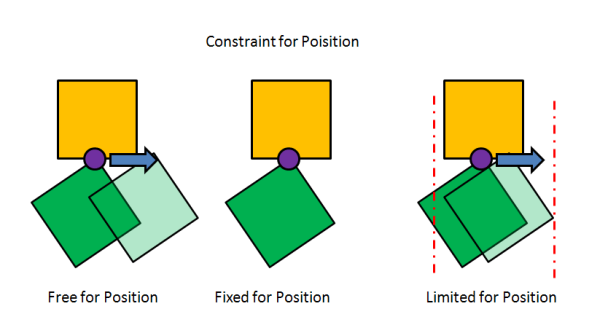
Supposing that there is this condition, constraint for X-axis is removed, and it means free for X-axis.
The similar thing comes out.
sceneJoints[numJoint].axis2Lim = new Vector2(0, 0);
Supposing that there is this condition, constraint for Y-axis is removed, and it means free for Y-axis.
sceneJoints[numJoint].axis1Lim = new Vector2(0, 0);
sceneJoints[numJoint].axis2Lim = new Vector2(0, 0);
sceneJoints[numJoint].angleLim = 0;
Supposing that there is this condition, then there are no constraint condition at all, ant it will be the same as well as the scene which does not have any constraints.
public override void InitScene ()
{
...
...
...
// Link a box rigid body to the scene with a rotation joint(with angle constraints)
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 10.0f);
sceneBodies[numBody].position = new Vector2(-20.0f, 0.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
PhysicsBody b1 = sceneBodies[0];
PhysicsBody b2 = sceneBodies[numBody-1];
sceneJoints[numJoint] = new PhysicsJoint(b1, b2, (b2.position), 0, (uint)numBody-1);
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].angleLim = 1;
sceneJoints[numJoint].angleLower = PhysicsUtility.GetRadian(-45.0f);
sceneJoints[numJoint].angleUpper = PhysicsUtility.GetRadian(45.0f);
numJoint++;
}
It is the following portions that are performing -45 degree to 45 degree with restrictions for rotation.
sceneJoints[numJoint].angleLim = 1;
sceneJoints[numJoint].angleLower = PhysicsUtility.GetRadian(-45.0f);
sceneJoints[numJoint].angleUpper = PhysicsUtility.GetRadian(45.0f);
public override void InitScene ()
{
...
...
...
// Link a box rigid body to the scene with a horizontal slider joint (with movement constraints)
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 10.0f);
sceneBodies[numBody].position = new Vector2(0.0f, 0.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
PhysicsBody b1 = sceneBodies[0];
PhysicsBody b2 = sceneBodies[numBody-1];
sceneJoints[numJoint] = new PhysicsJoint(b1, b2, (b2.position), 0, (uint)numBody-1);
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].axis2Lower = -10.0f;
sceneJoints[numJoint].axis2Upper = 10.0f;
sceneJoints[numJoint].angleLim = 1;
numJoint++;
}
It is the following portions that are performing the constraint from -10 m to +10 m with Y-axis restrictions.
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].axis2Lower = -10.0f;
sceneJoints[numJoint].axis2Upper = 10.0f;
public override void InitScene ()
{
...
...
...
// Link a box rigid body to the scene with a horizontal slider joint (with movement constraints)
{
sceneBodies[numBody] = new PhysicsBody(sceneShapes[2], 10.0f);
sceneBodies[numBody].position = new Vector2(0.0f, 0.0f);
sceneBodies[numBody].shapeIndex = 2;
numBody++;
PhysicsBody b1 = sceneBodies[0];
PhysicsBody b2 = sceneBodies[numBody-1];
sceneJoints[numJoint] = new PhysicsJoint(b1, b2, (b2.position), 0, (uint)numBody-1);
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis1Lower = -10.0f;
sceneJoints[numJoint].axis1Upper = 10.0f;
sceneJoints[numJoint].axis2Lim = new Vector2(0, 1);
sceneJoints[numJoint].angleLim = 1;
numJoint++;
// The horizontal slider joint is quite slippy,
// so to make the rigid body stop we add some air friction
b2.airFriction = 0.01f;
}
Horizontal restrictions are set up like the example of the move restrictions which can be set to vertical.
sceneJoints[numJoint].axis1Lim = new Vector2(1, 0);
sceneJoints[numJoint].axis1Lower = -10.0f;
sceneJoints[numJoint].axis1Upper = 10.0f;
// The horizontal slider joint is quite slippy,
// so to make the rigid body stop we add some air friction
b2.airFriction = 0.01f;